Wearable Haptic Bracelet
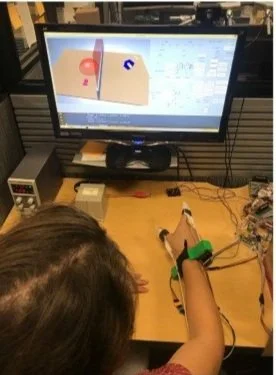
Haptic Feedback is a key component of creating a compelling and immersive virtual experience for a user to interact with and manipulate objects. I developed tactile sensing techniques for wearable bracelets that connect to a VR environment.

Introduction:
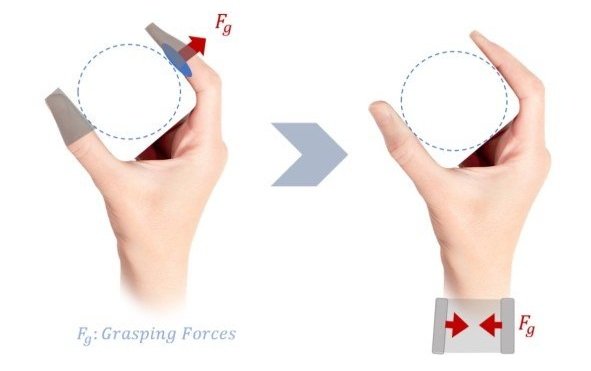
Often, skin deformation devices apply forces and torques to the user on the finger pad in order to mimic interactions that occur in the virtual world. However, these fingertip devices tend to be bulky, expensive and lack the ability to render shear forces. Additionally, there is often force saturation due to the small motors used. As a solution to this, I moved the haptic feedback from the fingertips to the forearm using the idea of sensory signals which creates a believable sensation when grasping or lifting an object.
Design: