Software
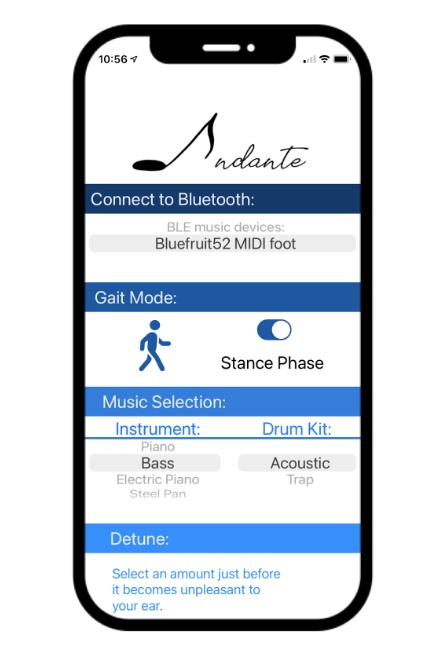
We built our app in the Objective C language and our software implementation allows for multiple music options. It allows for real time digital signal processing (or audio effects), onboard synthesis, and a variety of instrument and drum selections. Our app also allows the user to select from one of two gait modes:
The Swing Phase mode is geared toward individuals with stiff knee gait. The purpose of this mode is to encourage rapid hip, knee, and ankle flexion in early swing phase (so immediately after toe off).
The Stance Phase mode is geared toward individuals with flex knee gait to encourage proper bending of the knee.